Little Quadruped Has PCB Spine And No Wiringから発見。画像もここから転載。
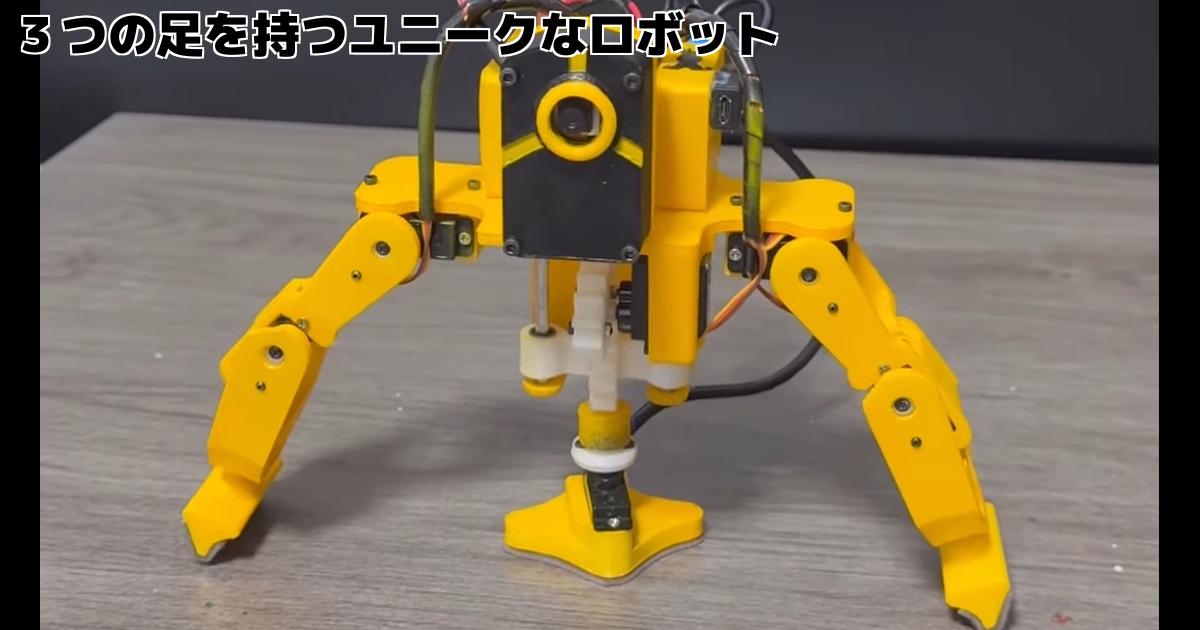
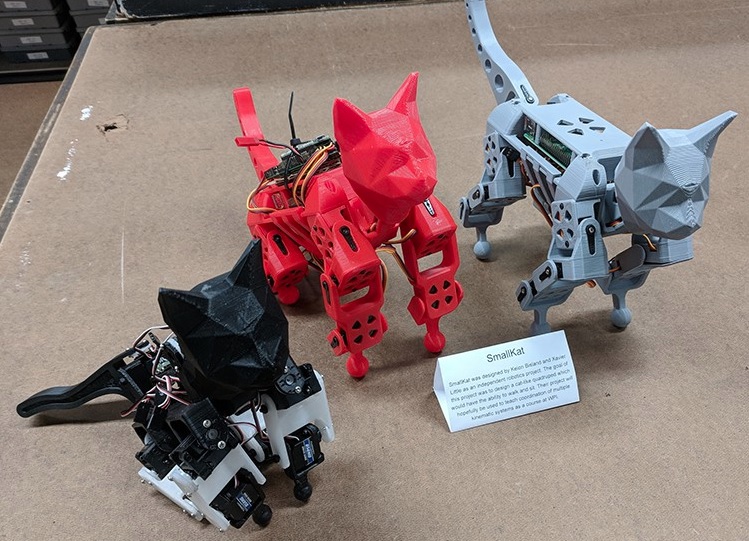
PCB基板と3Dプリンタ製のブラケットを組み合わせてうまく部品を固定できるようにした4足歩行ロボットの作例です。 コアとなるマイコンモジュールはXIAO ESP32C3です。
ロボットに対して基板が縦向きに設計されており、それを挟む形で3Dプリンタ製のケース、というかブラケット的なものを取り付ける方式です。 サーボモーターの固定や電池のマウントなどを非常に無駄なく実現できており、良い設計だと感じました。
← 前の記事 - 5×8のマトリクスLEDをICに「おんぶ」させて接続する

次の記事 - V-Cut入りの基板の動作チェックを一気に行う技 →